Matthias Püski ist Meister der 3D/2D-Grafik, mit Rhythmusgefühl und einer Liebe zur Spieleentwicklung.
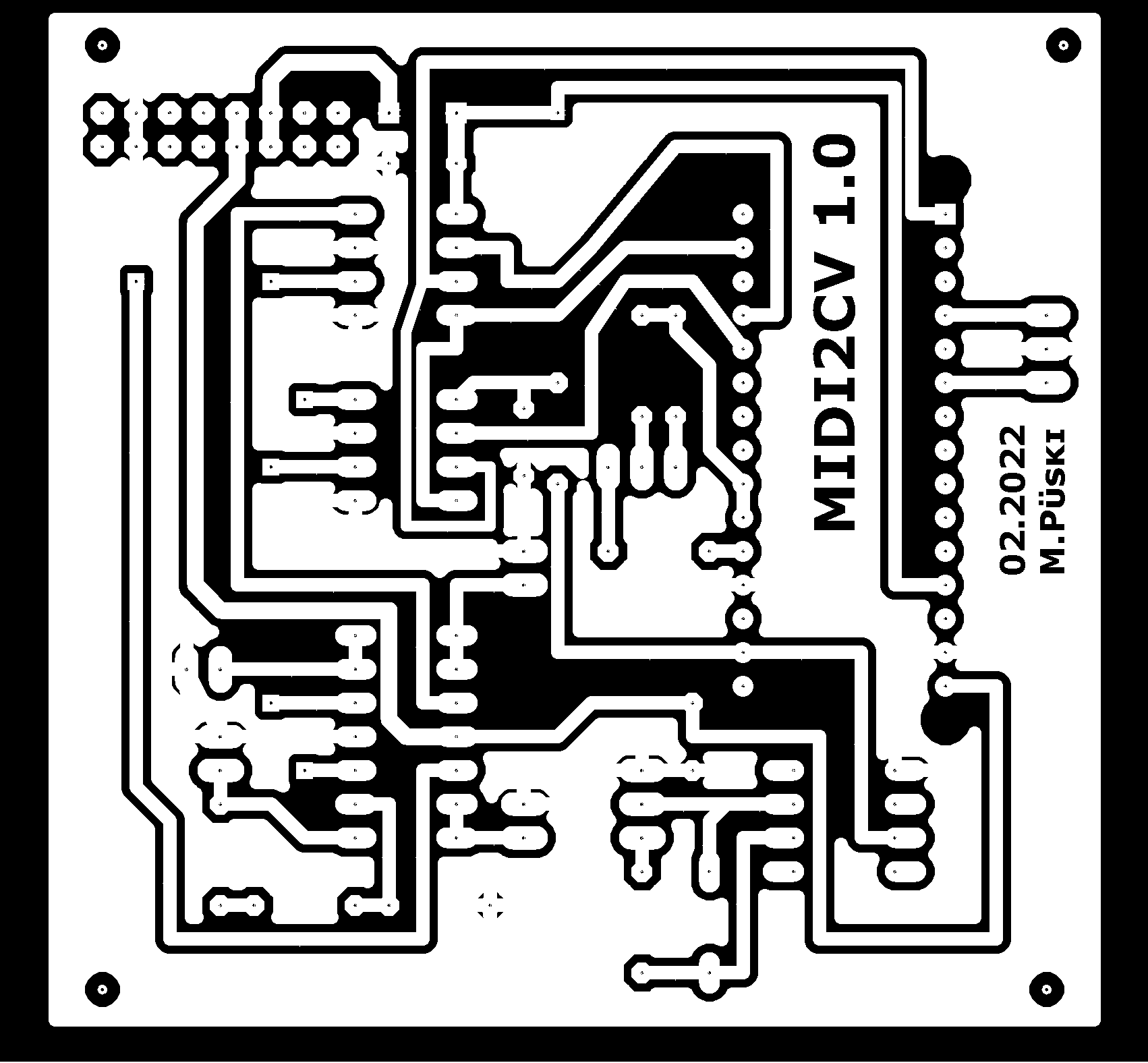
Matthias Püski wurde 1976 in Bergisch Gladbach geboren. Nach drei Jahrzehnten zog er in den südlichen Teil von Baden-Württemberg. Mit einer Ausbildung als Informationselektroniker und Informatiker bringt er nicht nur eine tiefe Affinität zur Technik mit, sondern hat durch seine Leidenschaft für die Fotografie auch den Weg zur Kunst gefunden, den er bereits seit seiner Kindheit verfolgt.
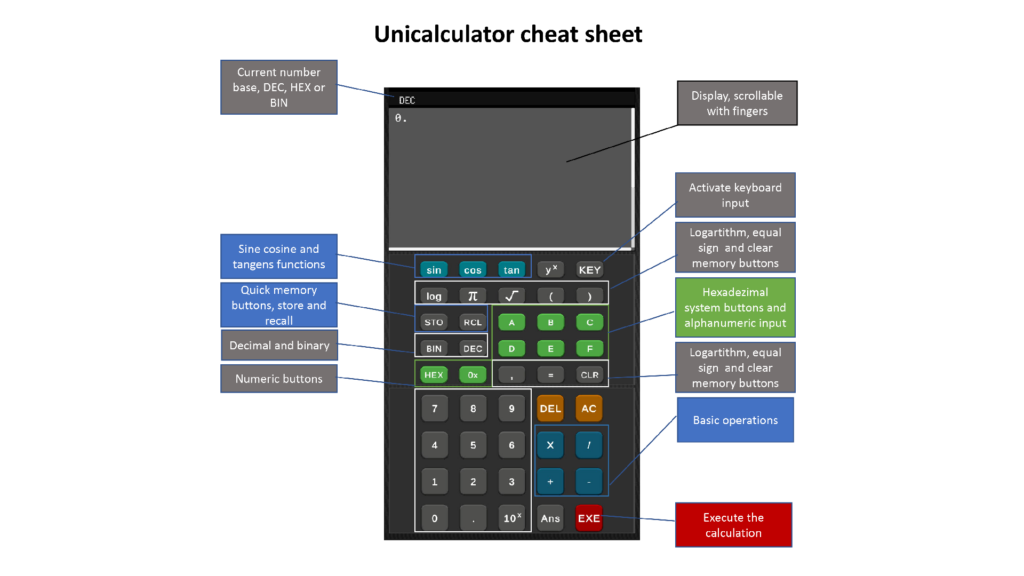
Als Selbstlerner hat er über die Jahre hinweg diverse künstlerische Techniken und Fähigkeiten erlernt. Seit zwei Jahrzehnten vertiefe er die 3D-Modellierung, wobei er insbesondere das Open-Source-Tool Blender nutzt und neuerdings auch Erfahrungen mit der Spiel-Engine Unity sammelt.
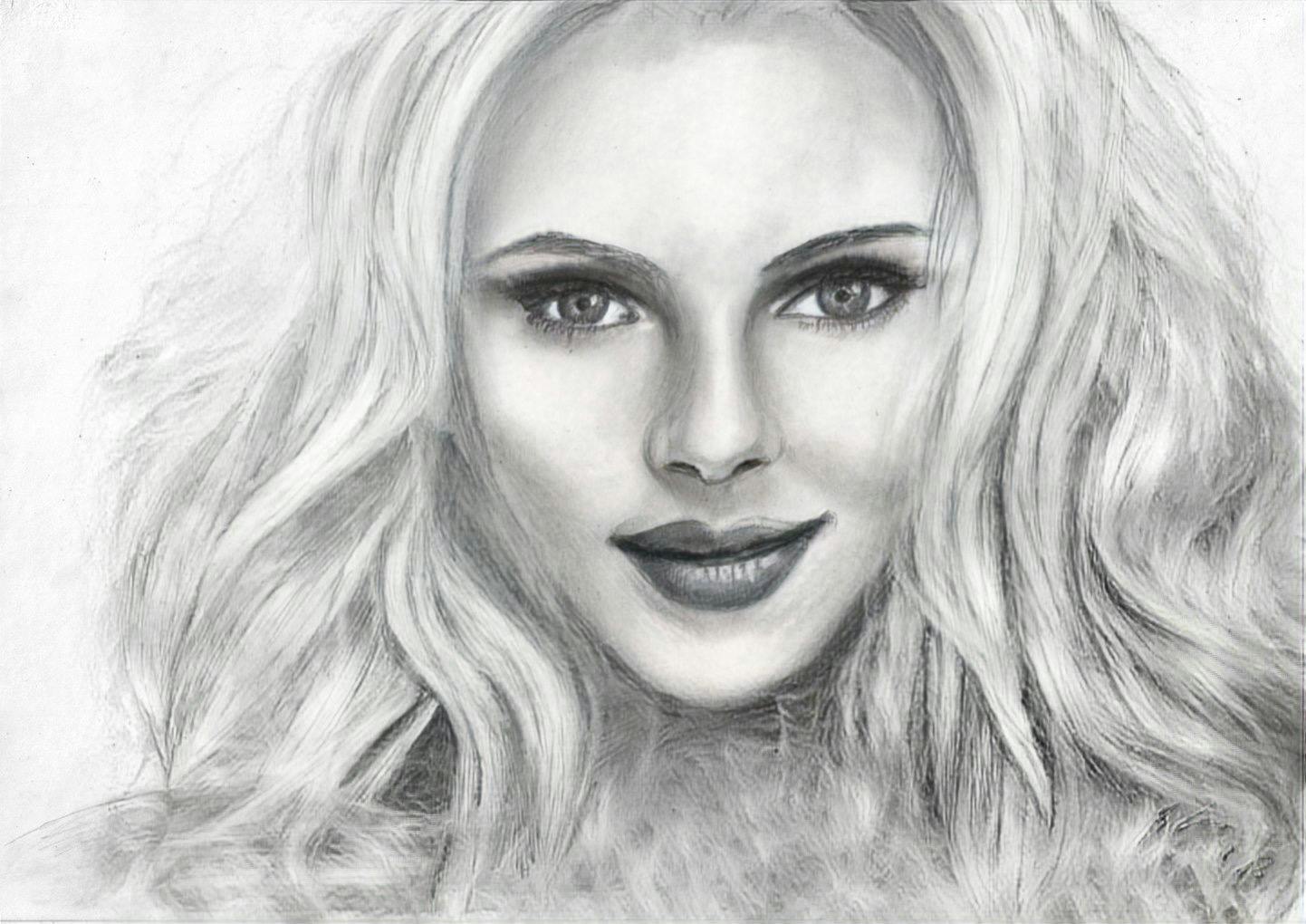
Zu seinen besonderen Leidenschaften gehört das Zeichnen von Porträts und Aktdarstellungen mittels Bleistift. Zudem hat es ihm die Landschaftsmalerei in Acryl angetan. Ab und zu nimmt er seine Kamera zur Hand, um inspirierende Motive festzuhalten, die er später auf Zeichenkarton oder Leinwand überträgt. Darüber hinaus widmet er sich der Produktion elektronischer Musik in seinem persönlichen Heimstudio.
🎮 🎵 🖥️ 🎨